 信息时间:2023-02-02
信息时间:2023-02-02  信息来源:中国自动化学会通讯第6期
信息来源:中国自动化学会通讯第6期
2022年2月11日上午,清华大学教授周彤做客首期CAA会士面对面活动,作题为“大规模网络化系统基本特性分析及其延伸”的报告。随着技术的进步和对性能要求的提高,系统规模日益增大。另外,随着人工智能等领域的发展,人造大规模网络层出无穷。然而,这类系统的可控/可观性、因果性、结构可辨识性判断等基本问题依然未能得到很好解决。周彤教授的报告引入一种基于输出连接的大规模网络化系统描述方式,讨论其可控/可观性、因果性、结构可辨识性等的判断,以及这些特性对子系统及其连接的要求。研究结果表明,此类系统可控/可观要求其每一个子系统都可控/可观,且其可控性和可观性仅决定于其子系统的传输零点和连接矩阵。周彤教授还给出一种独立依赖于每个子系统动态特性的因果性、结构可辨识性判断方法。在此基础上,引入网络化系统“可控/可观度”、“结构可辨识度”等问题,探讨其研究的必要性,以及对模型预测性、系统性能等的可能影响。本次活动由中国科协青年人才托举工程项目入选者、东北大学张晋熙副教授主持,共计近万人次在线观看直播。
一、研究背景和意义
在工业生产、生化调节、经济运行等实际过程中,存在大量的有很多子系统所构成的系统,小到细胞里的基因调控网络,大到当前广为讨论的万物互联的互联网,都属于网络化系统,如图1所示。
图1 网络化系统
从上个世纪60年代开始,这类系统的分析、综合就得到国内外研究人员持续广泛的关注。随着计算机围棋所取得的成功,近年来大量的人工神经网络不断涌现。但迄今为止,包括稳定性在内的许多网络化系统的基本科学问题依然没有得到很好的解决,如图2所示。随着技术的进步,系统规模日益增大,解决这些问题的紧迫性也越来越高。目前该领域的研究开始从兴趣驱动型向需求驱动型转换,同时这个领域的研究工作与可解释的人工智能等问题密切相关。
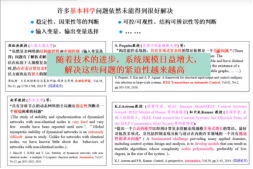
图2 基本科学问题
二、问题描述
首先引入一个模型对网络化系统的动态特性进行描述,即对每一个子系统,假设其动态特性可以由如图3所示状态空间模型进行描述。状态空间模型中的δ可以表示对函数进行求导,也可以表示对函数进行时间轴上的平移,即该系统可以表示连续系统,也可以表示离散系统。同时,将系统的输入和输出分别分解为内部输出和外部输出以及内部输入和外部输入。该子系统同时受到了v和 u的影响,但u来自外部,v为通过网络传递来的其他子系统的输出信号。而y是观测到的系统行为,z是系统的输出通过网络传递到另外的子系统,对另外的子系统进行作用的信号。对子系统输入输出信号进行区分后,可以把子系统之间相互影响关系用如图3所示代数方程表示,进而表示网络化系统结构的特性,包括其稀疏性等。图3所示模型允许每个子系统具有不同的动态特性,同时子系统之间的相互连接可以是任意的,因此它是有向的连接。
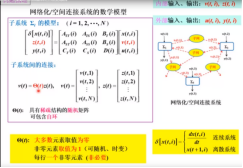
图3 网络化/空间连接系统模型
针对上述系统,所要做的事情是得到关于系统基本问题的计算上可行的解决方法,例如可控、可观的判断,因果、无脉冲模态的判断,信号跟踪、干扰抑制、稳定控制的充分/必要条件,子系统连接可辨识性以及分布式状态估计方法等。同时还需要得到对子系统动态、参数和连接的要求。
将所有子系统的状态和外部输入输出分别表示为一个向量,可以得到其集总式模型,表示如图4所示,系统矩阵A、B、C、D具体表达形式如图4所示,其中除子系统连接矩阵Θ(t) 外,其他所有的矩阵均为分块对角。图4的表达式充分反映了网络化系统的连接特性,如果将其与传统或经典的大规模系统模型进行比较可以发现,它包含了传统模型(图5),且其相较于传统模型的优越性在于其系统矩阵具有线性分式变换的形式。虽然子系统之间的连接通常是稀疏的,如果写成传统的形式,可能导致其稠密化,其原因是稀疏矩阵的逆通常是稠密的。
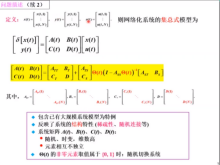
图4网络化系统集总式表示
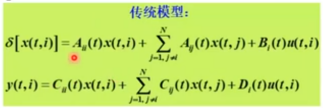
图5 传统模型
通过这个模型分析子系统参数对系统性能的影响。将子系统图片模型表示为如图6所示形式,子系统的系统矩阵以线性分式变换的形式依赖于其物理参数、化学参数或者其他基本参数,就可以把系统矩阵写成线性分式变换的形式,线性分式变换中的P矩阵(如图6)表示子系统的物理、化学或者生物参数,其他的矩阵都是已知的,表示系统的工作原理或其他已知信息。
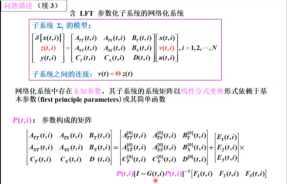
图6 含LFT参数化子系统网络化系统
那么上述假设下,对系统内部输入输出进行增广,如图7所示。如果我们引入一个系统假想或者虚拟内部输入图片,以及内部输出图片,将其与原来的系统内部输出和内部输入进行合并,构成新的网络化系统的内部输出和内部输入z(t,i)和v(t,i),对其连接矩阵进行相应的变化,即形成标准的网络化系统模型。因此,该模型可以在反映网络化系统结构特性的同时,用于讨论子系统的参数对网络化系统性能的影响。
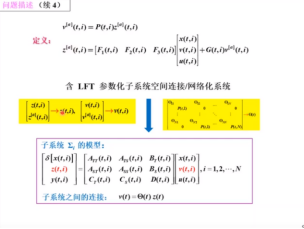
图7 问题描述(续4)
三、可控/可观性、可辨识性等
如图8所示从理论上我们已经证明,如果网络化系统子系统之间连接关系保持不变,同时系统适定,那么它能观的充分必要条件是多项式矩阵在每一个复λ处都列满秩。在该矩阵里面,除Θ外,其他所有矩阵均呈分块对角。但该判据在计算上不可行,其需要检验每一个复λ处,M(λ)多项式矩阵的取值是否为列满秩。
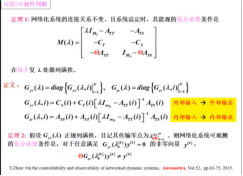
图8 定理1/定理2
如图8所示,为了得到计算上可行的判据,首先根据每个子系统的参数得到其内部输入到外部输出的传递函数Gyv(λ),其内部输入到内部输出的传递函数Gzv(λ),可根据子系统的参数矩阵计算。计算得到每一个子系统内部输入到外部输出以及内部输入到内部输出的传递函数阵后,可以通过分块对角的形式,构造整体的网络化系统的内部输入到外部输出和内部输出的传递函数矩阵。根据传递函数和上述理论基础,可以得到计算上可行的网络化系统可观测的充分必要条件,如图8中定理2所示。这个不等式条件中,Θ是子系统连接矩阵,Gzv是网络化系统内部输入到内部输出的传递函数阵,Gyv是网络化系统内部输入到外部输出传递函数阵,它们都具有分块对角形式,计算简单且其传输零点个数有限。该条件充分反映了每个子系统的动态特性和其参数以及网络化系统连接矩阵对该系统可观测性的影响。
由于可控跟可观是一个对偶的问题,类似可得到相应关于网络化系统可控的判断的条件。如果要网络化系统可观测,必须让多项式矩阵在任意λ都列满秩。由于除了Θ以外,其他矩阵都是分块对角的,可以证明Θ等于零,即子系统之间没有相互作用时,矩阵是列满秩充分必要条件是其每一个子块都是列满秩,如图9所示,这即是现代控制理论里面所得到的PBH判据。但通常网络化系统不会使Θ等于零。对每个子系统来讲这个矩阵都必须是列满秩。对于上述条件,可以得到正规列满秩假设的合理性及其对网络连接及传感器配置的要求,如图10和图11所示。根据图8所述定理2,可以通过一些数学变换以及代数运算得到系统的可观性对子系统连接对矩阵Θ的要求。
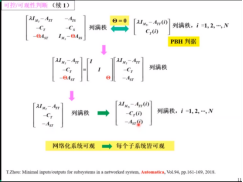
图9 可控/可观测性(续1)
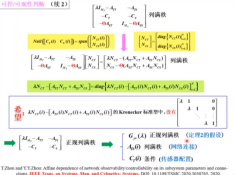
图10 可控/可观测性(续2)

图 11 可控/可观测性(续3)
应用示例如图12所示,假设网络化系统的每个子系统都是由运算放大器、电容、电阻所构成,它们可以被连接起来。无论系统如何连接其始终可控。但必须保证网络化系统良定性的前提,良定性即保证系统在外部输入的激励下,其外部输出是唯一的。
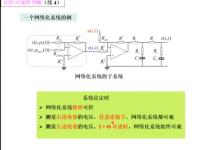
图12 可控/可观测性(续4)
类似地,还可以得到为保障系统的可观可控性,每个子系统的最少输入和输出个数以及输入输出矩阵的构造。根据网络化系统的结构,还可以得到相应的计算复杂度比较低的稳定性判据,以及信号跟踪和干扰抑制所需要满足的充分必要条件,和要让网络化系统满足因果性或者无脉冲模态,每个子系统或连接矩阵所需要满足的条件。
所谓的网络化系统的结构可辨识问题(如图13所示),即是否可以通过网络化系统外部输入和输出的测量值来估计出其子系统之间相互连接的矩阵,前提是已知每个子系统的动态特性。如果不知道,图13所述模型可以包含以线性分式变换的形式依赖于子系统的参数。
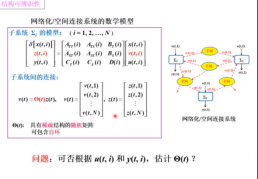
图13 结构可辨识性
假设网络化系统子系统的状态空间模型已知,研究在该前提下是否可以通过外部输入输出数据把网络化系统的子系统连接矩阵估计出来。如果把每个子系统换成人工神经网络的神经元,人工神经网络连接系数是否可以通过数据被估计出来,就是人工神经网络的可学习或可训练问题。问题的数学定义如图14所示。
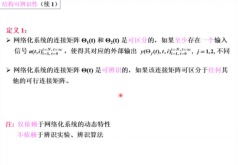
图14 结构可辨识性(续1)
网络化系统连接矩阵Θ可辨识意味着其可以和任意的可行的连接矩阵进行区分。是一类特殊的参数可辨识性问题,也包含一大类参数可辨识性问题。1987年,瑞典学者Lennart Ljung在System Identification一书中就指出,参数可辨识性问题是数学上很困难的问题。2020年,法国学者Collin等人在Annual Reviews in Control期刊的综述论文中表示,解决该问题依然十分困难。网络化系统结构可辨识的充分条件如图15定理6所述,它独立地依赖于每个子系统。结构可辨识的充要条件如图16所示。
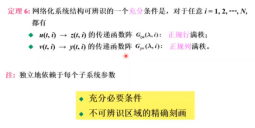
图15 定理6

图16 结构可辨识性(续3)
应用示例如图17所示,同样,网络化系统的子系统由运算放大器、电阻和电容所构成。子系统有一个内部输入,两个外部输入u1跟u2, 有两个内部输出。为了简洁起见,假设在子系统中除两个可变电阻Ri1和Ri2以外,其他所有电阻取值均一样,同时所有电容的取值一样。容易证明,该系统始终是良定的。Θ另外,只要 Ri1 和Ri 之比不等于 0.5, 则无论网络化系统如何连接,从理论上讲,均可以通过外部数据将网络化系统的连接矩阵估计出来。
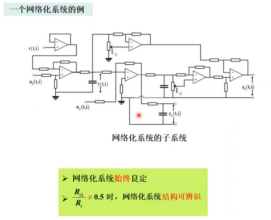
图17 网络化系统的子系统
如图 18所示,每个小车通过弹簧和阻尼器连接起来构成互联的机械系统。假设只有两个小车,N=2,并给出弹簧的系数和阻尼器的系数。在任意一个车上施加力,另一个车的位置都会发生变化。代表了控制系统的典型响应特性。根据上述理论结果,可证明其物理参数可以通过外部输入输出把它辨识出来。
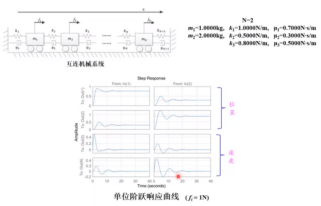
图18 实验结果1
假设连接两个小车的弹簧和阻尼器的系数分别有-90%到90%的误差,在第一个小车上加幅值为一牛顿的伪随机形式的外部激励,产生100万个样本,即弹簧和阻尼器的系数分别均匀产生1000个样本。外部输出之差如图19所示,在模型参数的地方取得了唯一的最小值,且最小值变化得非常快。这说明了网络化系统的参数确实可辨识。
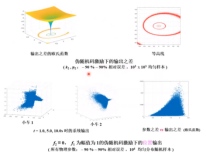
图19 实验结果2
小车1和小车2在1秒、5秒、10秒三个特殊的时间点上输出的变化。为了减少计算量,按随机均匀分布产生参数。假设每个物理参数都有-90%到90%的相对误差,随机产生100万个均匀样本。在两个小车的质量、三个弹簧及三个阻尼器的系数都出现较大的变化时,系统的外部输出,即小车的位置可能变化很小。具体如图20所示。网络化系统的输出变化幅度可能对参数变化的方向非常敏感,实验结果如图20-22所示。
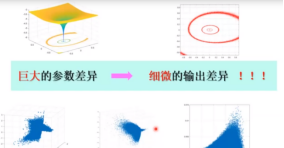
图20 实验结果3
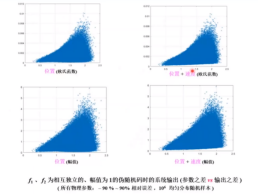
图21 实验结果4
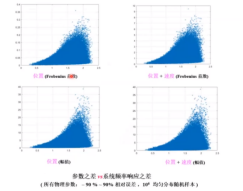
图22 实验结果5
用模型参数拟合实验数据是一项常见但经常具有挑战性的任务,特别是当模型包含多个参数时。超丝带形状是很多的非线性、多参数模型都具有的性质。在这些模型中,大多数参数仅仅起有限的作用。它们可以被设置为极限值(零、无穷大等),仍然不会太多地影响模型的预测性能。描述物理现象的大规模模型需要研究新的统计和计算工具。
四、小结
通过近十年的研究,在网络化系统的可观可控性、因果性、结构可辨识性、稳定性、基于局部信息的状态估计方法等问题上取得了一些结果,还需要进一步探讨网络化系统的可辨识度、可控可观度等问题。
(本文刊登于2022年《中国自动化学会通讯》第6期)
作者简介

周彤
中国自动化学会会士
清华大学教授
周彤,现为清华大学自动化系工业智能与系统研究所教授、博士研究生导师,中国自动化学会会士, IEEE Fellow。1984年7月于成都电讯工程学院获自动控制工学学士学位,1988年7月于电子科技大学获自动控制理论与应用工学硕士学位,1991年3月于日本国金泽大学获电气与电子工程工学硕士学位,1994年3月于日本国大阪大学获产业机械专业工学博士学位。主要研究领域为:网络化系统建模与控制、鲁棒控制与滤波、面向控制的系统辨识、磁悬浮技术、基因调控网络建模与分析等。研究工作得到了“教育部优秀青年教师资助计划” (2001年度)、“教育部跨世纪优秀人才培养计划” (2002年度)。研究结果获教育部提名中国自动化学会自然科学奖一等奖(2020年度)。曾担任 IEEE Transactions on Automatic Control 的 Associate Editor(连续二届)。目前担任 Automatica 的Associate Editor(连续五届)。
联系地址:陕西省西安市咸宁西路28号西安交通大学电信学院综合自动所内 联系电话:029-82664629 029-82668775 陕ICP备08001950号-1
版权所有:陕西自动化学会 Copyright © 2006 - 2015 www.sxpaa.com All Rights Reserved 技术支持:陕西博通网络
